Архив журнала Моделист-Конструктор

|
ДАЧА-АМФИБИЯЛ. СУХАНОВ, инженер
Мы уже рассказывали о вездеходе-скалолазе, который мог бы стать новым видом горного транспорта (см. «М-К» № 12 за 1974 год).
Но машины с управляемыми траками способны будут найти применение и в полярных районах — для передвижения как по ледяным заторошенным полям, так и по воде. Сначала, возможно, как малое транспортное средство полярных исследователей, а в дальнейшем — как специальный грузовой транспорт типа «вода — лед» для осваиваемых районов Сибири и Севера.
Однако это дело будущего. А пока свое веское слово мог бы сказать конструктор-любитель. Но чтобы для энтузиаста, который дерзнет начать эру нового движителя, это имело практический смысл, автор предлагает построить с траковым движителем дачу-амфибию для отдыха всей семьей на воде и суше. И здесь большой простор для технических поисков и находок.
Для передвижной дачи, очевидно, не важна скорость, а следовательно, и мощность источника энергии. Важно без лишних хлопот и сборов передвигаться куда угодно, соединив прелести неторопливого похода по лесам, холмам, рекам и озерам с легкостью автомобильной переброски всего необходимого снаряжения.
Размеры и тяговые характеристики такой машины-палатки будут зависеть от численности вашей семьи. Они могут увеличиваться как за счет наращивания длины направляющих и установки дополнительных опорных элементов, так и соединения нескольких таких отсеков в жесткую или гибкую конструкцию. Правда, длину первой вряд ли целесообразно брать больше 4-5 м, иначе ее придется делать слишком прочной и, следовательно, тяжелой. Ширина и высота всего сооружения не должны быть большими — для обеспечения возможности передвижения по лесу.
Начать работу, очевидно, следует с конструкции трака — опорного элемента, а также выбора его двигателя. Отправными цифрами могут служить данные для приводных тележек электроталей: мощности электромотора в 180 Вт достаточно для перемещения по горизонтали 500 кг груза со скоростью 1,2 км/ч. Напряжение в 6 В или 12 В можно подать прямо на направляющие: безопасно, и утечка энергии в воде будет невелика.
Продольные размеры траков должны быть таковы, чтобы на сгибах направляющих умещалось их не меньше 5 штук, — в этом случае тяговые усилия будут суммироваться на сгибах при упоре траков друг в друга почти без потерь. При использовании электродвигателей, диаметры которых невелики, это условие позволяет расположить весь движитель не в обхват корпуса, как на модели, а между лодками корпуса в кожухе, верхняя плоскость которого может служить столом или спальным местом.
Конструкция самих траков может быть, очевидно, любой. Главное здесь, чтобы тяга и сцепление с направляющими обеспечивали самоподъем траков на вертикальных участках направляющих.
Работа модели показала, что при фрикционном зацеплении во избежание перекосов опорных элементов они должны быть четырехколесными по ведущим или, по крайней мере, поджимным каткам; при зубчатом зацеплении, когда невозможна пробуксовка катков, можно взять простейшую двухколесную схему. Электропитание на двигатели траков можно подать через изолированные друг от друга направляющие и скользящие контакты, выполненные из щеток электродвигателей.
Для амортизации движителя и в качестве устройств взаимодействия его с поверхностью пути лучше всего использовать простейшие надувные подушки, укрепленные на внешней стороне опорных элементов. Они могут быть выполнены, например, из автомобильных или мотороллерных камер, помещенных в прочные чехлы.
Повороты машины с одним центрально расположенным жестким движителем могут осуществляться с помощью поворачивающейся пары боковых поддерживающих колес или лыж.
Как источник электроэнергии для тихоходной машины можно использовать маломощные переносные бензоэлектростанции, выпускаемые для зарядки аккумуляторов и питания кинопередвижек, или сделать такую электростанцию самому, объединив в один агрегат двигатель мотолодки, мопеда, мотороллера или бензонасоса с несколькими автомобильными генераторами. Для компенсации неравномерностей нагрузки и выбора различных режимов работы двигателя желательно также установить несколько переключаемых аккумуляторов.
Движитель включается подачей напряжения на направляющие. Изменение движения на обратное осуществляется переключением полярности напряжения.
Для выбора различных режимов работы движителя на нижнюю, рабочую, и остальную, холостую, часть направляющих желательно подавать различные напряжения: номинальное и увеличенное, например удвоенное. (В простейшем случае можно ограничиваться и одним значением напряжения.) Очевидно, что эти части направляющих тогда также должны быть выполнены изолированными.
При подаче на холостую часть направляющих увеличенного напряжения, например от двух последовательно соединенных аккумуляторов, возврат траков будет происходить со значительно большей скоростью (форсирование режима двигателей здесь не опасно, так как нагрузка и время работы малы). Тогда почти все они будут сосредоточены внизу: это обеспечит режим максимальной тяги и равномерность движения.
При слабом сопротивлении движению (ровная дорога, пологий спуск, хорошее скольжение) можно перейти на наиболее экономичный толчкообразный характер движения. Для этого достаточно на рабочую часть направляющих подать увеличенное, а на холостую — номинальное или пониженное напряжение. В этом случае почти все траки будут сосредоточены на холостой части направляющих, а по рабочей они будут двигаться поочередно с большой скоростью, давая машине энергичный толчок.
На пологом спуске все траки могут быть вообще остановлены на верхней части направляющих понижением напряжения на них до нуля: спуск будет осуществляться на поддерживающих лыжах или колесах без затраты энергии. Таким же образом может осуществляться и буксировка вашей машины-палатки.
На крутом спуске, когда необходимо эффективное торможение, напряжение может быть снято, наоборот, с рабочей части направляющих, а на холостой оставлено номинальное, пониженное или увеличенное. При этом тележки с различной частотой будут выходить на рабочую часть направляющих и, входя в сцепление с поверхностью склона, заставлять работать свои электромоторы в режиме генераторов, заряжающих аккумуляторы, осуществляя одновременно эффективное торможение машины. Естественно, для обеспечения такой возможности не только электромоторы, но и редукторы должны быть обратимы, то есть не быть червячными или волновыми, которые, казалось бы, наиболее целесообразно применить для получения больших передаточных чисел. Возможно, что такой движитель сможет превращаться в источник электроэнергии для зарядки аккумулятора и при закреплении машины-палатки на достаточно быстрой реке против течения, например, во время ночной остановки.
Водоизмещение лодок корпуса и общий вес должны быть рассчитаны так, чтобы нижняя часть направляющих находилась в воде, а верхняя — над водой. При этом опорные элементы будут работать как лопасти весел, а сплошные диски поворачивающихся колес — как рули, что обеспечит эффективное движение и выполнение поворотов в воде. Переход от движения по суше к плаванию и обратно не потребует никакой предварительной подготовки машины.
Таковы вкратце основные соображения по постройке и возможностям использования самодеятельными конструкторами только одного, простейшего, варианта тракового движителя с двумя жесткими направляющими по продольной оси.
Вряд ли возможно даже перечислить все остальные варианты этого движителя. Да и не стоит лишать заинтересовавшегося читателя удовольствия самому придумать и изготовить еще никем не сделанную машину. Конкретное выполнение, число, компоновка направляющих и опорных элементов, связь направляющих с корпусом и друг с другом, тип двигателей, движители, скоростные режимы опорных элементов и устройства взаимодействия их с поверхностью или средой, способы передачи энергии на опорные элементы и управление ими — вот те детали, меняя и комбинируя различные варианты которых вы сможете получить машину, лазающую по горам, шагающую по болотам, мчащуюся по степи (с помощью высокоскоростных линейных индукционных двигателей с роторами — пластинами опорных элементов на воздушной или магнитной подушке), плавающую и даже... летающую.
И такие машины будут.
Потому что в век самых разнообразных и сложных машин нелепо уповать на древнее колесо или гусеницы: не пора ли отказаться от них или оставить их там, где им и надлежит быть — на проторенных путях.
Пора идти дальше. Путь открыт.
Кто шагнет первым?
|
|
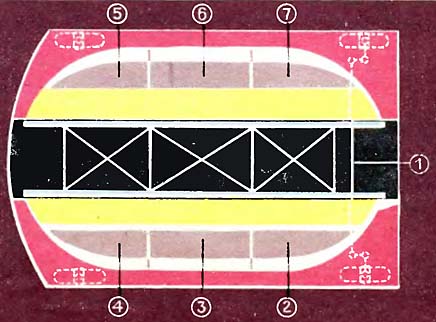
План жесткой части корпуса: 1 — рулевая тяга к поворачивающимся вспомогательным, колесам, 2, 7 — отсеки бензоэлектростанции и топлива, 3, 6 — блоки непотопляемости (пенопласт), 4 — отсек продовольствия и снаряжения, 5 — отсек аккумуляторов и инструмента. |
|
Рис. 1. Схема вездеходной дачи-палатки: 1 — лодка-поплавок корпуса; 2 — жесткие направляющие (например, из дюралюминиевого уголка); 3 — опорный элемент; 4 — электродвигатель; 5 — редуктор; 6 — надувная подушка; 7 — прижимной каток с пластинчатой пружиной; 8 — ведущий каток; 9, 10 — косяки и поперечины жесткого крепления лодок; 11 — боковые поддерживающие колеса (поворачивающиеся); 12 — амортизаторы поддерживающих колес; 13 — жесткая часть корпуса.
|